Sommaire:
- infos générales Journal de manip
- Description
- Composants Spécifiques
- Computer Vision
- Cookbook
- Culture Générale / Connaissances insolites
- DataBase
- Développement, Gestion et Commercialisation de projet
- Diagrams
- Docker
- Documentation_Automatique
- ESP8266 & ESP32
- Freecad
- GIT (versioning)
- Golang
- HPVC
- IDE & Text Editor
- Informatique
- Kicad
- LINUX
- MAC OS
- Machine Learning
- MQTT
- Musique
- Optimisation du travail (et de l’apprentissage)
- PowerShell
- PYTHON
- Regex
- Reseau
- Soudure
- Technos Web
- Trading
- URLtheque
- XML_JSON
- Arborescence du projet
Composants Spécifiques¶
Programmation des ATMega¶
Pour programmer un ATmega (328P ; 2560 etc) on peut utiliser Trois environnement différent :
- AVR_Studio:
Proposer par Microchip (anciennement Atmel) permet de faire du debug au travers de la sonde JTAG mais n’accepte que les programmateur officiels
- Arduino:
En utilisant le mode « Arduino as ISP. Ne permet pas de programmer autre chose que du “.ino”
- AVRDUDE:
Tout en ligne de commande, mais accepte tous les programmateur (même “Arduino as ISP”
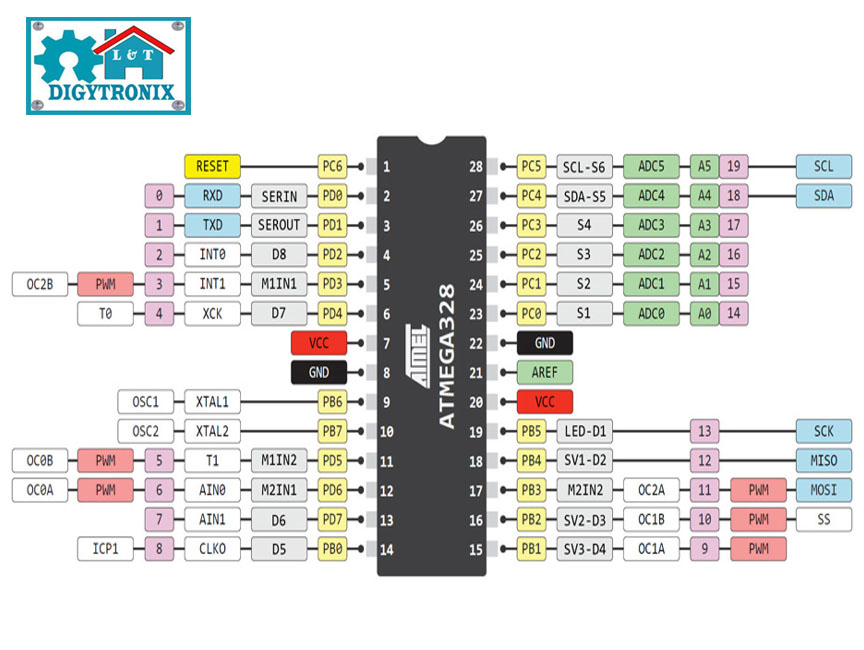
ATMega 328p-PU Pinout¶
Installation du programmateur USBASP sous windows 10¶
- Liens_Web:
- http://zadig.akeo.ie/
# Le logiciel Zadig permet d’installer des pilotes USB # pour plusieurs programmateur différents
AVRDUDE¶
Installation
- Liens_Web:
- https://sourceforge.net/projects/winavr/files/
# dernière version : 2010-01-20
/!\ Ne pas cocher la case “ajouter au path” mais ajouter les chemins manuellement
Chemins à ajouter dans le path
C:WinAVR-20100110bin
C:WinAVR-20100110utilsbin
Utilisation
Téléverser un programme
avrdude -c [NOM_DU_PROGRAMATEUR] -p [NOM_DU_MICROCONTROLEUR] -v (mode verbose) -U flash:[r|w|v]:[NOM_DU_HEX_A_TELEVERSER] ex : avrdude -c usbasp -p m2560 -v -U flash:w:Marlin_witbox_2-510.hexObtenir la liste des noms des microcontroleurs utilisables
avrdude -c [NOM_DU_PROGRAMATEUR] ex : avrdude -c usbasp
Magnetomettre : HMC5883L¶
- liens WEB:
- http://www.instructables.com/id/Interfacing-Digital-Compass-HMC5883L-with-Raspberr/?ALLSTEPS
# Instructable (install I2C et test en Python3)
- http://think-bowl.com/raspberry-pi/i2c-python-library-3-axis-digital-compass-hmc5883l-with-the-raspberry-pi/
# Exemple de mise en œuvre + liste des fonctions
- https://www.sparkfun.com/products/10530
# fiche produit Sparkfun (arduino)
Implantation HMC5883L¶
La sérigraphie est masqué lorsque le magnétomètre est enfiché dans une breadbord. L’implantation si dessous est donc présenter en vue de dessus (donc sérigraphie cachée)
Haut 3v3 DRDY SDA SCL GND VCC_+5v Bas
Installation des librairies quick2wire et i2clibraries¶
- Préparation :
Si ce n’est pas déjà fait, il faut installer les outils Python :
sudo apt-get update sudo apt-get upgrade sudo apt-get install i2c-tools sudo apt-get install python3-smbus # Quick2wire.i2c peut aussi être utilisé our l'i2c sudo apt-get install python3 sudo reboot
- L’installation et configurations des librairies et outils Quick2wire
N.B : le lignes qui suivent sont copiées telles quelles depuis la page instructables
- Se positionner à l’endroit ou l’on veut installer quick2wire
Configuration du HMC5883L¶
- la déclinaison terrestre
Pour pouvoir être le plus précis possible, il faut recalibrer la boussole en tenant compte de notre décalage par rapport au pôle magnétique. On appel ça : « la déclinaison terrestre » Pour cela on à besoin de nos coordonnées (les coordonnées du LAB):
Longitude : 49° 1’22.48 »N
Latitude : 2° 1’50.51 »E
se qui donne à la date du 18/08/2015 : 0° 9,24”
Motteur Pas à Pas : 28BYJ-48¶
N.B : se PAP doit être piloté par un driver comme le UNL2003
Spécification du PAP¶
angle par pas (moteur)
5.625°
Nbe de pas / tours (moteur)
64 (360/5.625)
ratio (démultiplicateur)
1/64
angle par pas (en sortie d’arbre)
0.087890625°
Nbe de pas / tour (en sortie d’arbre)
4096
Correspondance entre le driver et les GPIO¶
BCM (GPIO)
Sérigraphie sur UNL2003
GPIO17
N1
GPIO18
N2
GPIO27
N3
GPIO22
N4
Phases¶
==> CW Direction (1-2 Phase )
lead Wire color
1
2
3
4
5
6
7
8
4 orange
x
x
x
3 yelow
x
x
x
2 pink
x
x
x
1 blue
x
x
x
- N.B : les 8 phases donnent 1 tour complet sur le moteur,
soit 1/64 de tour en sortie d’arbre.
Organisation des phases en python3¶
# Séquence de sortie ndp = 8 phase = list(range(ndp)) phase[0] = [1,0,0,0] phase[1] = [1,1,0,0] phase[2] = [0,1,0,0] phase[3] = [0,1,1,0] phase[4] = [0,0,1,0] phase[5] = [0,0,1,1] phase[6] = [0,0,0,1] phase[7] = [1,0,0,1]
- N.B : la liste contenu dans chaque phase, correspond à l’état
(1 = Hight = True ; 0 = Low = False) à appliquer sur le broches du GPIO
ex : phase[0] = [1,0,0,0] --> GPIO17 = 1 --> GPIO18 = 0 --> GPIO27 = 0 --> GPIO22 = 0
Picamera¶
- liens WEB:
Activation du module caméra sur le RPi¶
- se connecter au module de configuration
- #.* faire la séquence suivante
installation de la camera¶
Insérer la limande dans le ports situé au niveau du port HDMI.
N.B : la partie métallique doit être en direction du port HDMI
Instalation de la librairie PiCamera¶
- Faire les mises à jour système de rigueur puis
utilisation avec python¶
import picamera
Capteur ultrason : HC-SR04¶
- Liens Web:
Vocabulaire et définissions pour le HC-SR04¶
- Trig:
- En Sortie (haut-parleur - Trig)
# 1 impulsion est égale a 10us (0.00001)
- Echo:
En Entrée (Micro - Echo)
# Attention les entrée du RPi étant en 3.3v, il faut faire un pont diviseur entre la broche « Echo » et le GND pour pouvoir se brancher sur le RPi
- Vitesse du son:
Le son se déplace à une vitesse d’environ 343 m/s (à température ambiante de 20°), soit environ 34300 cm/s
- Distance:
- D = 17150 x time
# 17150 correspond a la vitesse du son / 2 (34300/2). On divise par 2 car seule la distance en l’obstacle et le mur nous intéresse et non la distance total parcourue par l’onde radio.
Spécification du HC-SR04¶
- Alimentation:
5 V
- porté:
2 cm à 500 cm
- Résolution:
0.3 cm
- Fréquence:
40 kHz
Captheur de Méthane : MQ4¶
- Liens_Web:
- https://www.pololu.com/file/0J311/MQ4.pdf
# DATASHEET du composant
- https://www.sparkfun.com/datasheets/Sensors/Biometric/MQ-4.pdf
# Une autre version de la DATASHHET (avec des dessins plus gros et schéma plus détaillés)
- INFOS:
Les capteurs de Type “MQx” ont besoin d’être alimentés en continue
Les capteurs de Type “MQx” doivent nécessite un délais de minimum 48H pour fournir des informations fiables
Toutes les valeurs données ici concerne uniquement le Méthane. Pour tout autre gaze détecté par le MQ4, il faut se reporter à la documentation
- /attention\:
Sur la version PCB la résistance Rl, qui devrait être une résistance ajustable de 10 à 47k, est une résistance fixe de 1K. D’après la documentation, cette résistance devrait être étalonnée pour 5000 ppm soit à peut près 20K
Liste des gazes pouvant être détecter par le MQ4¶
GPL
Méthane (CH4)
Hydrogène (H2)
Monoxyde de Carbone (CO)
Alcool
Fumé de cigarette
Définition des constantes et valeurs de références¶
- Liens_Web:
- https://www.jayconsystems.com/tutorials/gas-sensor-tutorial/
# Tous les calculs ont été effectuer sellons les calculs de cette page mais sur la courbe CH4
- RS:
C’est la résistance mesurer mesurer par le capteur. Cette valeur est Variable.
- R0:
C’est la résistance du capteur en condition de gaz normal. Cette valeur est Variable. Elle doit être calculer.