 Journal de Manip
Journal de Manip
Raspberry¶
Accéder au fichier de configuration du RPI¶
sudo raspi-config
Connaître la configuration matériel du RPI¶
- CPU:
cat /proc/cpuinfo
pour passer la langue et le clavier en français¶
- liens WEB:
Changer la langue depuis l’interface de configuration du Pi
- se connecter a l’interface de configuration
sudo raspi-config
Ouvrir le menu « 5 Internalisation Options »
Ouvrir « I1 Change Locale »
Si une langue comme « en_GB.UTF-8 UTF-8 » est cochée, décochez-la en appuyant sur « Espace »
Cochez la langue « fr_FR.UTF-8 UTF-8 »
Sélectionner « OK » puis valider
Vérifier le jeu de paramétres régionaux puis valider sur « OK »
Valider sur « Finish » puis redemarrer
Modifier manuellement le fichier keyboard
- Editer le fichier keyboard
sudo nano /etc/default/keyboard
remplacer « gb » par « fr »
Vocabulaire¶
- HAT (Chapeau)
C’est le nom que porte les cartes filles sur Raspberry Pi. Sur Arduino, cela s’appel un Shield (Bouclier)
La bibliotheque RPi.GPIO¶
- liens Web:
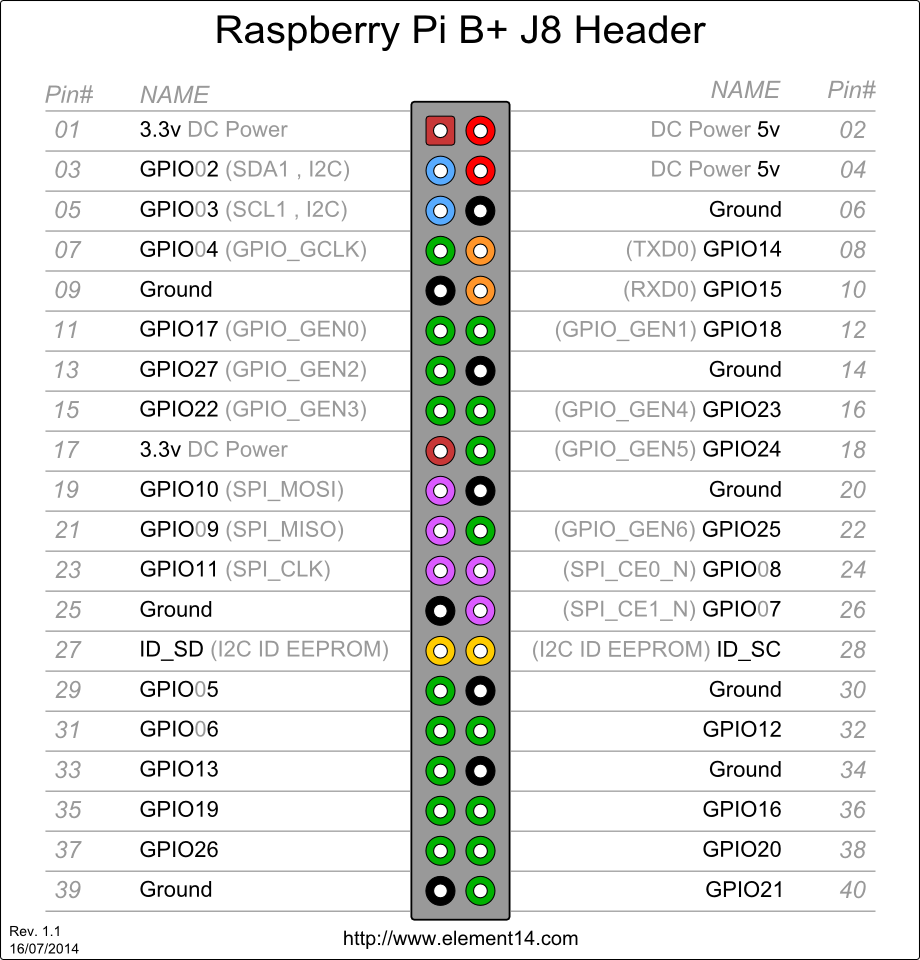
Implantation RPi2¶
Installation de RPi.GPIO¶
Si RPi.GPIO n’est pas installer, saisir :
pip install RPi.GPIOPour mettre à jour la bibliothèque :
pip install RPi.GPIO -- upgrade
Utilisation de RPi.GPIO avec Python¶
Importer la bibliothèque :
import RPi.GPIO as GPIO # Attention, c'est bien RPi avec un i minusculeChoisir la notation pour accèder au broche du GPIO.
Il y a 2 façon d’adresser les broches du GPIO, soit par sont numéro de broche (GPIO.BOARD) soit par son nom dans le registre (GPIO.BCM). C’est la methode « .setmode() » qui permet de configurer le mode de fonctionnement des GPIO.
Quick ref, les fonctions associer aux GPIO en python¶
- Liens Web:
liste des différentes commandes :
# RPi.GPIO Basics cheat sheet - Don't try to run this. It'll fail!
# Alex Eames http://RasPi.TV
# http://RasPi.TV/?p=4320
# RPi.GPIO Official Documentation http://sourceforge.net/p/raspberry-gpio-python/wiki/Home/
import RPi.GPIO as GPIO # import RPi.GPIO module
# choose BOARD or BCM
GPIO.setmode(GPIO.BCM) # BCM for GPIO numbering
GPIO.setmode(GPIO.BOARD) # BOARD for P1 pin numbering
# Set up Inputs
GPIO.setup(port_or_pin, GPIO.IN) # set port/pin as an input
GPIO.setup(port_or_pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN) # input with pull-down
GPIO.setup(port_or_pin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # input with pull-up
# Set up Outputs
GPIO.setup(port_or_pin, GPIO.OUT) # set port/pin as an output
GPIO.setup(port_or_pin, GPIO.OUT, initial=1) # set initial value option (1 or 0)
# Switch Outputs
GPIO.output(port_or_pin, 1) # set an output port/pin value to 1/GPIO.HIGH/True
GPIO.output(port_or_pin, 0) # set an output port/pin value to 0/GPIO.LOW/False
# Read status of inputs OR outputs
i = GPIO.input(port_or_pin) # read status of pin/port and assign to variable i
if GPIO.input(port_or_pin): # use input status directly in program logic
# Clean up on exit
GPIO.cleanup()
# What Raspberry Pi revision are we running?
GPIO.RPI_REVISION # 0 = Compute Module, 1 = Rev 1, 2 = Rev 2, 3 = Model B+
# What version of RPi.GPIO are we running?
GPIO.VERSION
# What Python version are we running?
import sys; sys.version
# Query the setup status of a port
GPIO.gpio_function(port) # The result will be a numerical return code, which
# will have one of the following values…
# 0 = GPIO.OUT
# 1 = GPIO.IN
# 40 = GPIO.SERIAL
# 41 = GPIO.SPI
# 42 = GPIO.I2C
# 43 = GPIO.HARD_PWM
# -1 = GPIO.UNKNOWN
Protocole I2C¶
- liens Web:
http://www.instructables.com/id/Interfacing-Digital-Compass-HMC5883L-with-Raspberr/
- http://www.bitflippersanonymous.com/raspberry-pi-projects/i2c-temperature
# exemple pour un capteur de température i2c
- http://mchobby.be/wiki/index.php?title=ArduPi-I2C-Support
# Exemple de comunication en i2c entre un RPi et un arduino en utilisant quick2wire.i2c
- Ref:
Livre (papier) Raspberry Pi2, page 558.
Chapitre 14, Section 2.3, paragraphe 2.3.3 : installation de la carte
Installation / Activation de l’I2C¶
- Entrée dans le fichier de config du rpi
- sudo raspi-config
- 9 Advanced Options
A7 I2C
[YES], [YES], [Finish]
Ajouter une entrée dans le fichier « modules »
- sudo nano /etc/modules
ajouter : i2c-dev
Sauvegarder et quitter
- Ajouter les paquets nécessaires
sudo apt-get install i2c-tools
sudo apt-get install python-smbus
- Redémarer le rpi
sudo reboot
- Ajouter l’utilisateur courant au groupe i2c
sudo adduser $USER i2c
Connaître l’adresse des matériels branchés¶
- se placer dans le dossier modprob.d
cd /etc/modprobe.d/
- exécuter la commande i2cdetect avec des droits élever
sudo i2cdetect -y 1
Exemple avec un magnétomètre HMC5883L :
pi@raspiBlanc ~ $ cd /etc/modprobe.d/ pi@raspiBlanc /etc/modprobe.d $ sudo i2cdetect -y 1 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- 1e -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- --
UART¶
Libérer l’UART¶
N.B : par défaut l’uart est configuré en mode console pour le débug. pour l’utiliser, il faut d’abord le libérer.
#. Interroger le journal sur les dernier événement de la liaison série pour vérifier que l’opération n’a pas déjà été effectuer
dmesg | grep ttysi l’opération n’a pas encore été effectuer, le résultat obtenu doit être :
[ 0.002072] console [tty1] enabled [ 0.195363] 3f201000.uart: ttyAMA0 at MMIO 0x3f201000 (irq = 83, base_baud = 0) is a PL011 rev2 [ 0.695429] console [ttyAMA0] enabled
configurer l’UART avec l’outil de configuration du Rpi :
sudo raspi-configse déplacer dans les menu selon la séquence suivante :
[ 8 ] --> [ A8] --> [ Non ] Le quatrième écran vous informe que Serial est maintenant désactivé : :: [ Ok ] --> [ Finish ]Redémarrer :
sudo rebootVérifier dans le journal que l’opération a bien été prise en compte :
demsg | grep ttyce qui doit vous donner le résultat suivant :
[ 0.002051] console [tty1] enabled [ 0.195175] 3f201000.uart: ttyAMA0 at MMIO 0x3f201000 (irq = 83, base_baud = 0) is a PL011 rev2On constate que la dernière ligne à disparue, le mode débug sur la sortie UART est donc bien désactivée.
PWM, Servo moteur et DC Motor¶
- liens Web:
- https://fr.wikipedia.org/wiki/Modulation_de_largeur_d’impulsion
# La page wikipedia sur la Modulation de Largeur d’Impulsion (Pulse Width Modulation – PWM)
- http://deusyss.developpez.com/tutoriels/RaspberryPi/PythonEtLeGpio/#LIII-B-7
# utilisation du PWM sur raspberry (en français)
- https://www.youtube.com/watch?v=BLtV0Z38S94
# utilisation du PWM sur raspberry (vidéo)
- https://www.youtube.com/watch?v=ddlDgUymbxc
# utilisation du servo moteur avec le RPi (video)
- https://www.youtube.com/watch?v=v2jpnyKPH64
# principe de fonctionnement d’un servo moteur (video)
- https://www.youtube.com/watch?v=W7cV9_W12sM
# utilisation d’un DC Motor avec le Pi (vidéo)
- https://sourceforge.net/p/raspberry-gpio-python/wiki/PWM/
# doc officiel GPIO.PWM (y’a pas grand chose)
- utilisation general du PWM / PFM
Exemple d” utilisation (en python 3) :
[ debut de script ] import RPI.GPIO as GPIO # importation de la bibliothèque RPI GPIO.setmode(GPIO.BCM) # Utilisation des GPIO en mode "BCM" une_broche_du_pi = 25 GPIO.setup(une_broche_du_pi, GPIO.OUT) # On choisi la sur la quelle on veut faire du PWM # Il vaut mieux éviter de choisir une broche qui est aussi utilisée # pour autre chose comme de l'I2C, du SPI ou du Serial frequence = 50 rapportCyclique = 50 p = GPIO.PWM(une_broche_du_pi, frequence) # on initialise le PWM sur la broche choisie et on indique la fréquence p.start(rapportCyclique) # On l'impulsion en indiquant le rapport cyclique (Duty Cycle) # # Le rapport cyclique correspond au rapport de la durée de l’impulsion # sur la periode. Cette valeur est exprimée en pourcentage # voir https://fr.wikipedia.org/wiki/Rapport_cyclique_d'ouverture rapportCyclique = 80 p.ChangeDutyCycle(rapportCyclique) # pour changer le rapport cyclique "a la volée", on utilise # la methode RPI.GPIO.PWM.ChangeDutyCycle() frequence = 100 p.ChangeFrequency(frequence) # On peut changer la frequence "a la volee". On parle alors de PFM # on utilise la méthode RPI.GPIO.PWM.ChangeFrequency() p.stop() # on arrête l'impulsion GPIO.cleanup() # on libère toutes les GPIO [fin de script ]
- servo moteur :
La période pour un servo moteur est généralement de 20ms (a controler avec la documentation). les angles : 0 ; 90 ; 180 son généralement associes a des durée d’impulsion de 0.5 ; 1.5 ; 2.5 ms ce qui donne les rapports cycliques (duty cycle) suivants :
0.5/20 = 2.5% 1.5/20 = 7.5% 2.5/20 = 12.5 %
L’ensemble des valeurs de 0 a 180° son donc comprises entre 0.5 et 2.5 ms soit entre 2.5% et 12.5%.
- DC motor :
Le rapport cyclique permet de gérer la vitesse du moteur(valeur de 0 à 100). Il est préférable d’utiliser 2 broches PWM pour gérer le sens de rotation.
A
B
Actions
0
0
rotation off
0
1
rotation on (sens 1)
1
0
rotation on (sens 2)
1
1
rotation off
La fréquence est a adapter en fonction du bruit du moteur (quant il « chante », c’est pas bon)
Input pull-up / pull-down¶
- liens Web:
- http://deusyss.developpez.com/tutoriels/RaspberryPi/PythonEtLeGpio/#LIII-B-8
# un petit exemple en fr et en python
- http://raspberrypi-aa.github.io/session2/input.html
# petit panorama sur les entrées (interruption et pull-up-down)
- Pull-Up et Pull-Down sur le RPi
Le RPi possède en interne une résistance de tirrage qui peut être activée de 2 façons différentes :
Pull-Up ([résistance entre le +3.3v et la broche] + gnd)
Pull-Down (+3.3v + [résistance entre la broche et le gnd])
Activation de la Pull-Up :
GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_UP)
Activation de la Pull-Down :
GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
Les interruptions (python + GPIO)¶
- liens Web:
- http://raspi.tv/2013/how-to-use-interrupts-with-python-on-the-raspberry-pi-and-rpi-gpio
# introductions aux interruptions (part 1)
- http://raspi.tv/2013/how-to-use-interrupts-with-python-on-the-raspberry-pi-and-rpi-gpio-part-2
# part2 - Threaded callback
- http://raspi.tv/2013/how-to-use-interrupts-with-python-on-the-raspberry-pi-and-rpi-gpio-part-3
# part 3 - Multiple threaded callback interrupts in Python
- http://eduscol.education.fr/sti/sites/eduscol.education.fr.sti/files/ressources/pedagogiques/4346/4346-4-rpi-gpio.pdf
# petite présentation en fr (avec exemple en python)
- http://raspberrypi-aa.github.io/session2/input.html
# petit panorama sur les entrées (interuption et pull-up-down)
- http://deusyss.developpez.com/tutoriels/RaspberryPi/PythonEtLeGpio/#LIII-B-9
# Les 3 types d’interruptions expliquées en Français
Plein d’astuce pour la gestion au quotidien¶
- liens Web:
- http://www.framboise314.fr/raspbian-tout-un-tas-de-trucs/#Effacement_de_lrsquocran
# Exemple complet d’utilisation d’un Raspberry Pi et des GPIO dans docker
Utiliser les GPIO dans un container (Docker)¶
- Liens_Web:
https://iotbytes.wordpress.com/create-your-first-docker-container-for-raspberry-pi-to-blink-an-led/
- https://stackoverflow.com/questions/30059784/docker-access-to-raspberry-pi-gpio-pins
# La réponse de Tobias du 12/01/2018 présentes les 3 moyen d’accéder aux GPIO